| Mawhrin-Skel © 2006 |  |
|
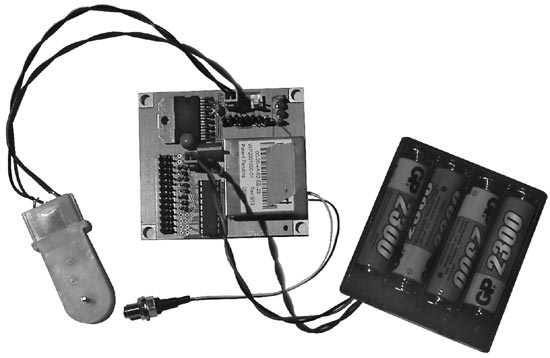
These are some very short notes about the controller board used in the robot workshops. The printed circuit board layout can be downloaded as gerber files (MSGerber.tar.gz). The robots use a controller board that supports a wireless Internet connection, a micro-controller "brain", and a motor driver. This provides a relatively self-contained platform that can be connected to many different types of mechanical system. The wireless Internet connection is provided by a Lantronix WiPort 802.11 to serial interface. This is a small OEM module that is built around the Dallas TINI system. It has 2 serial ports that can be bridged to 2 separate network ports. In this circuit, port 1 connects to the PIC 16F88 built-in UASART to send and receive data. The WiPort draws 480 mA of power, which is a lot for a small robot that runs on batteries. (A useful upgrade would be an on/off switch for the the WiPort that is controlled by the PIC "brain".) The "brain" of the robot is a Microchip PIC 16F88. This is an 18 pin microcontroller that has analog inputs, a built-in UASART (for serial communication), timers, an internal 8 MHz clock, and other features. With the built-in clock, it can run with a minimum of external components (an advantage for small robots). In this circuit, the PIC provides 8 inputs and 6 outputs that can be used to connect to sensors and other devices on the robot. 4 of the outputs are normally connected to the motor driver. We developed a base system on the 16F88 that can be accessed through telnet and used both to control the robots remotely and to download code into the "brain". Having the ability to download code into the robots via the Internet enables you to make small programming changes without having to pull any chips out of the system, or hook up any wires! The L298HN motor driver chip can run 2 DC motors in forward or reverse. The circuit board has space for DO-15 style fast-recovery diodes that give you a maximum current of 1 Amp. The Parts List:
| |